Arduino乒乓球游戏之8×8点阵应用
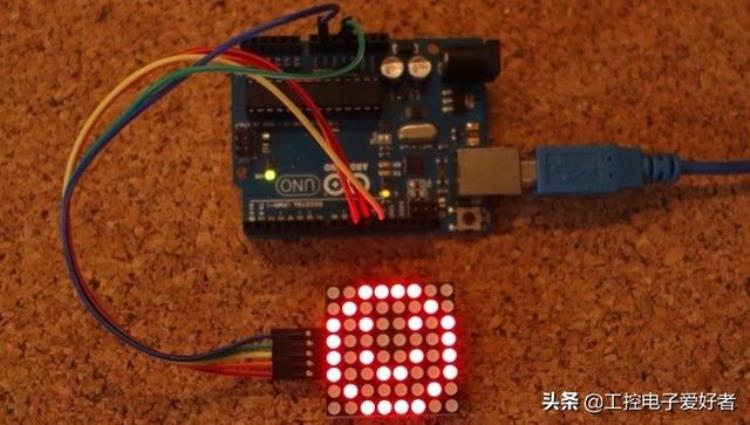
在本应用中,我们将使用的点矩阵是8×8矩阵,这意味着它具有8列8行,因此总共包含64个LED。
MAX7219芯片仅需使用Arduino电路板的3个数字引脚,即可更轻松地控制点矩阵。我认为最好的选择是购买以MAX7219芯片为模块的点矩阵,这将简化布线。

您一次可以控制多个矩阵。为此,您只需要将它们彼此连接即可,因为它们的两侧都有引脚以扩展点矩阵。
所需部件
对于本应用,您需要:
1x 8×8点矩阵,带有MAX7219跳线Arduino UNO引脚接线
您只需要将5个引脚从点矩阵连接到Arduino开发板即可。接线非常简单:
点矩阵针 接线到Arduino Uno
地线 地线
VCC 5伏
DIN标准 数码针
CS 数码针
时钟 数码针
如何使用Arduino控制点矩阵
为了使控制点矩阵更加容易,您需要下载并在Arduino IDE中安装LedControl库。要安装该库,请按照下列步骤操作:
1. 单击此处下载LedControl库。您的下载中应该有一个.zip文件夹
2. 解压缩.zip文件夹,您应该得到LedControl-master文件夹
3. 重命名文件夹 到LedControl
4. 将LedControl 文件夹移至Arduino IDE安装 库 文件夹
5. 最后,重新打开您的Arduino IDE
使用LedControl库函数
在点矩阵上显示内容的最简单方法是使用setLed(),setRow()或setColumn()函数。这些功能使您可以一次控制一个LED,一行或一列。
这是每个函数的参数:
setLed(addr,row,col,state)
· addr是矩阵的地址,例如,如果只有1个矩阵,则int addr将为零。
· row是led所在的行
· col是led所在的列
· state
· 如果您要打开LED,则为true或1
· 如果为假,则为false或0
setRow(addr,row,value)
setCol(addr,column,value)
指数
如前所述,此矩阵有8列和8行。每个索引的索引范围都是0到7。下面是一个更好理解的模型:
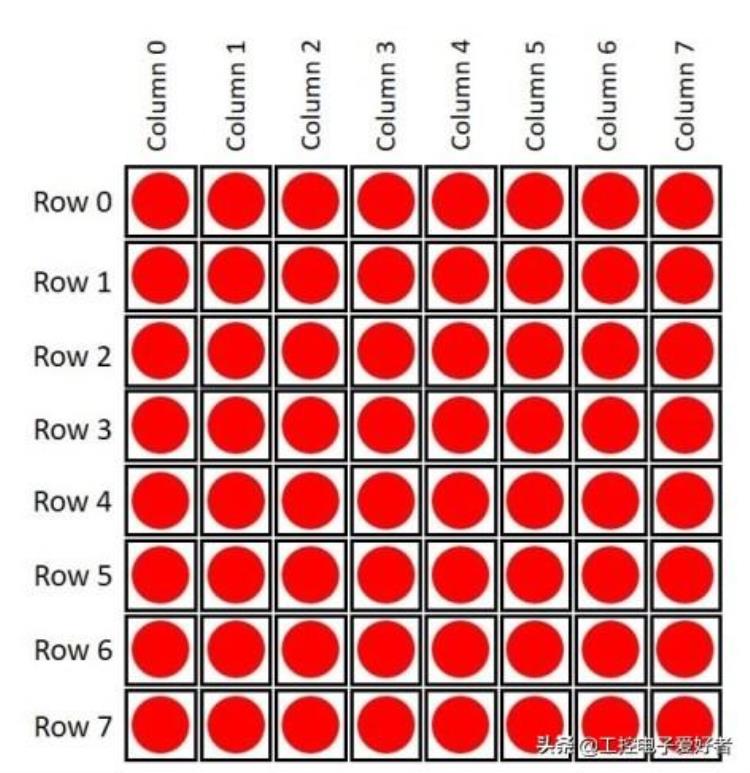
如果要在矩阵中显示某些内容,则只需要知道确定的行或列中的LED是打开还是关闭。
例如,如果您想露出笑脸,这是您需要做的:
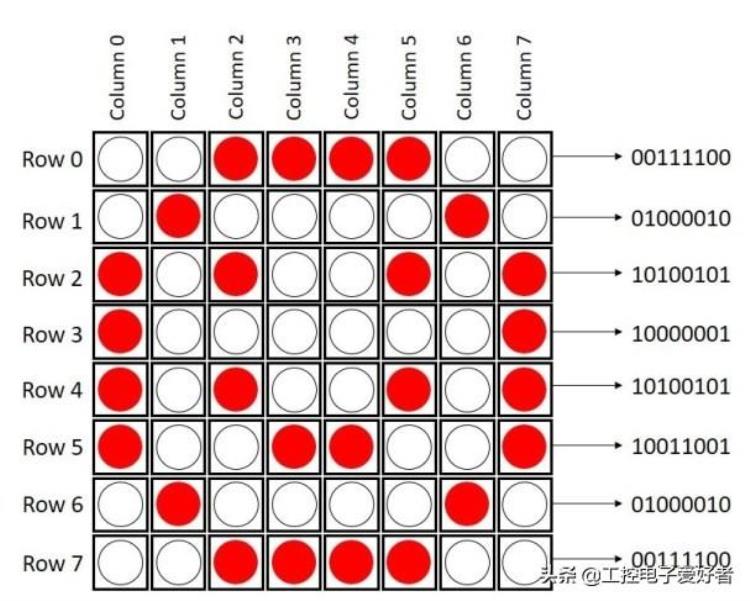
源代码
这是一个简单的草图,其中显示三种类型的面孔:悲伤的面孔,中性的面孔和幸福的面孔。将以下代码上传到您的开发板上:
#include "LedControl.h"
#include "binary.h"
/*
DIN connects to pin 12
CLK connects to pin 11
CS connects to pin 10
*/
LedControl lc=LedControl(12,11,10,1);
// delay time between faces
unsigned long delaytime=1000;
// happy face
byte hf[8]= {B00111100,B01000010,B10100101,B10000001,B10100101,B10011001,B01000010,B00111100};
// neutral face
byte nf[8]={B00111100, B01000010,B10100101,B10000001,B10111101,B10000001,B01000010,B00111100};
// sad face
byte sf[8]= {B00111100,B01000010,B10100101,B10000001,B10011001,B10100101,B01000010,B00111100};
void setup() {
lc.shutdown(0,false);
// Set brightness to a medium value
lc.setIntensity(0,8);
// Clear the display
lc.clearDisplay(0);
}
void drawFaces(){
// Display sad face
lc.setRow(0,0,sf[0]);
lc.setRow(0,1,sf[1]);
lc.setRow(0,2,sf[2]);
lc.setRow(0,3,sf[3]);
lc.setRow(0,4,sf[4]);
lc.setRow(0,5,sf[5]);
lc.setRow(0,6,sf[6]);
lc.setRow(0,7,sf[7]);
delay(delaytime);
// Display neutral face
lc.setRow(0,0,nf[0]);
lc.setRow(0,1,nf[1]);
lc.setRow(0,2,nf[2]);
lc.setRow(0,3,nf[3]);
lc.setRow(0,4,nf[4]);
lc.setRow(0,5,nf[5]);
lc.setRow(0,6,nf[6]);
lc.setRow(0,7,nf[7]);
delay(delaytime);
// Display happy face
lc.setRow(0,0,hf[0]);
lc.setRow(0,1,hf[1]);
lc.setRow(0,2,hf[2]);
lc.setRow(0,3,hf[3]);
lc.setRow(0,4,hf[4]);
lc.setRow(0,5,hf[5]);
lc.setRow(0,6,hf[6]);
lc.setRow(0,7,hf[7]);
delay(delaytime);
}
void loop(){
drawFaces();
}
乒乓球比赛
对于乒乓游戏,您只需要在前面的原理图中添加一个1k欧姆的电位器即可。组装新电路,如下所示:
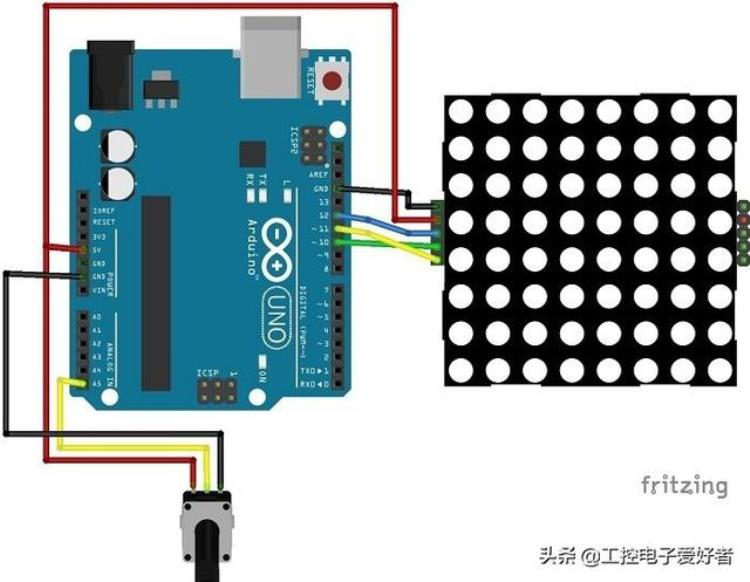
源代码
然后,将以下代码上传到您的Arduino开发板:
#include "LedControl.h"
#include "Timer.h"
#define POTPIN A5 // Potentiometer
#define PADSIZE 3
#define BALL_DELAY 200
#define GAME_DELAY 10
#define bounce_VERTICAL 1
#define BOUNCE_HORIZONTAL -1
#define NEW_GAME_ANIMATION_SPEED 50
#define HIT_NONE 0
#define HIT_CENTER 1
#define HIT_LEFT 2
#define HIT_RIGHT 3
//#define DEBUG 1
byte sad[] = {
B00000000,
B01000100,
B00010000,
B00010000,
B00000000,
B00111000,
B01000100,
B00000000
};
byte smile[] = {
B00000000,
B01000100,
B00010000,
B00010000,
B00010000,
B01000100,
B00111000,
B00000000
};
Timer timer;
LedControl lc = LedControl(12,11,10,1);
byte direction; // Wind rose, 0 is north
int xball;
int yball;
int yball_prev;
byte xpad;
int ball_timer;
void setSprite(byte *sprite){
for(int r = 0; r < 8; r ){
lc.setRow(0, r, sprite[r]);
}
}
void newGame() {
lc.clearDisplay(0);
// initial position
xball = random(1, 7);
yball = 1;
direction = random(3, 6); // Go south
for(int r = 0; r < 8; r ){
for(int c = 0; c < 8; c ){
lc.setLed(0, r, c, HIGH);
delay(NEW_GAME_ANIMATION_SPEED);
}
}
setSprite(smile);
delay(1500);
lc.clearDisplay(0);
}
void setPad() {
xpad = map(analogRead(POTPIN), 0, 1020, 8 - PADSIZE, 0);
}
void debug(const char* desc){
#ifdef DEBUG
Serial.print(desc);
Serial.print(" XY: ");
Serial.print(xball);
Serial.print(", ");
Serial.print(yball);
Serial.print(" XPAD: ");
Serial.print(xpad);
Serial.print(" DIR: ");
Serial.println(direction);
#endif
}
int checkBounce() {
if(!xball || !yball || xball == 7 || yball == 6){
int bounce = (yball == 0 || yball == 6) ? BOUNCE_HORIZONTAL : BOUNCE_VERTICAL;
#ifdef DEBUG
debug(bounce == BOUNCE_HORIZONTAL ? "HORIZONTAL" : "VERTICAL");
#endif
return bounce;
}
return 0;
}
int getHit() {
if(yball != 6 || xball xpad PADSIZE){
return HIT_NONE;
}
if(xball == xpad PADSIZE / 2){
return HIT_CENTER;
}
return xball < xpad PADSIZE / 2 ? HIT_LEFT : HIT_RIGHT;
}
bool checkLoose() {
return yball == 6 && getHit() == HIT_NONE;
}
void moveBall() {
debug("MOVE");
int bounce = checkBounce();
if(bounce) {
switch(direction){
case 0:
direction = 4;
break;
case 1:
direction = (bounce == BOUNCE_VERTICAL) ? 7 : 3;
break;
case 2:
direction = 6;
break;
case 6:
direction = 2;
break;
case 7:
direction = (bounce == BOUNCE_VERTICAL) ? 1 : 5;
break;
case 5:
direction = (bounce == BOUNCE_VERTICAL) ? 3 : 7;
break;
case 3:
direction = (bounce == BOUNCE_VERTICAL) ? 5 : 1;
break;
case 4:
direction = 0;
break;
}
debug("->");
}
// Check hit: modify direction is left or right
switch(getHit()){
case HIT_LEFT:
if(direction == 0){
direction = 7;
} else if (direction == 1){
direction = 0;
}
break;
case HIT_RIGHT:
if(direction == 0){
direction = 1;
} else if(direction == 7){
direction = 0;
}
break;
}
// Check orthogonal directions and borders ...
if((direction == 0 && xball == 0) || (direction == 4 && xball == 7)){
direction ;
}
if(direction == 0 && xball == 7){
direction = 7;
}
if(direction == 4 && xball == 0){
direction = 3;
}
if(direction == 2 && yball == 0){
direction = 3;
}
if(direction == 2 && yball == 6){
direction = 1;
}
if(direction == 6 && yball == 0){
direction = 5;
}
if(direction == 6 && yball == 6){
direction = 7;
}
// "Corner" case
if(xball == 0 && yball == 0){
direction = 3;
}
if(xball == 0 && yball == 6){
direction = 1;
}
if(xball == 7 && yball == 6){
direction = 7;
}
if(xball == 7 && yball == 0){
direction = 5;
}
yball_prev = yball;
if(2 < direction && direction < 6) {
yball ;
} else if(direction != 6 && direction != 2) {
yball--;
}
if(0 < direction && direction < 4) {
xball ;
} else if(direction != 0 && direction != 4) {
xball--;
}
xball = max(0, min(7, xball));
yball = max(0, min(6, yball));
debug("AFTER MOVE");
}
void gameOver() {
setSprite(sad);
delay(1500);
lc.clearDisplay(0);
}
void drawGame() {
if(yball_prev != yball){
lc.setRow(0, yball_prev, 0);
}
lc.setRow(0, yball, byte(1 << (xball)));
byte padmap = byte(0xFF >> (8 - PADSIZE) << xpad) ;
#ifdef DEBUG
//Serial.println(padmap, BIN);
#endif
lc.setRow(0, 7, padmap);
}
void setup() {
// The MAX72XX is in power-saving mode on startup,
// we have to do a wakeup call
pinMode(POTPIN, INPUT);
lc.shutdown(0,false);
// Set the brightness to a medium values
lc.setIntensity(0, 8);
// and clear the display
lc.clearDisplay(0);
randomSeed(analogRead(0));
#ifdef DEBUG
Serial.begin(9600);
Serial.println("Pong");
#endif
newGame();
ball_timer = timer.every(BALL_DELAY, moveBall);
}
void loop() {
timer.update();
// Move pad
setPad();
#ifdef DEBUG
Serial.println(xpad);
#endif
// Update screen
drawGame();
if(checkLoose()) {
debug("LOOSE");
gameOver();
newGame();
}
delay(GAME_DELAY);
}
最后
您是否曾经在Arduino项目中使用过点矩阵?如果您喜欢这篇文章,可能您还会喜欢我的下一篇文章,敬请期待。谢谢阅读,
特别声明:所有资讯或言论仅代表发布者个人意见,乐多体育仅提供发布平台,信息内容请自行判断。
-
 在本应用中,我们将使用的点矩阵是8×8矩阵,这意味着它具有8列8行,因此总共包含64个LED。 MAX7219芯片仅需使用Arduino电路板的3个数字引脚,即... (查看全文)2023-02-02 | 阅读:171次
在本应用中,我们将使用的点矩阵是8×8矩阵,这意味着它具有8列8行,因此总共包含64个LED。 MAX7219芯片仅需使用Arduino电路板的3个数字引脚,即... (查看全文)2023-02-02 | 阅读:171次










- 特别声明:本站所有直播和视频均来自互联网,本站不从事任何经营业务,仅为体育爱好者提供免费赛事数据服务。备案号:苏ICP备2020049342号广告合作@huzhan6688:QQ:95498723